International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 11, Issue 12 (December 2024), Pages: 129-139

----------------------------------------------
Original Research Paper
Path planning control in known environments using turning points
Author(s):
Affiliation(s):
Department of Mechanical Engineering, Technical Institute of AL-Diwaniyah, AL-Furat AL-Awsat Technical University, Najaf, Iraq
Full text

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0002-2343-929X
Corresponding author's ORCID profile: https://orcid.org/0000-0002-2343-929X
Digital Object Identifier (DOI)
https://doi.org/10.21833/ijaas.2024.12.015
Abstract
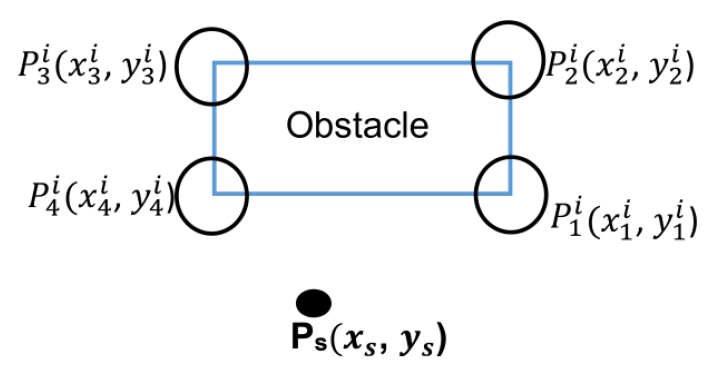
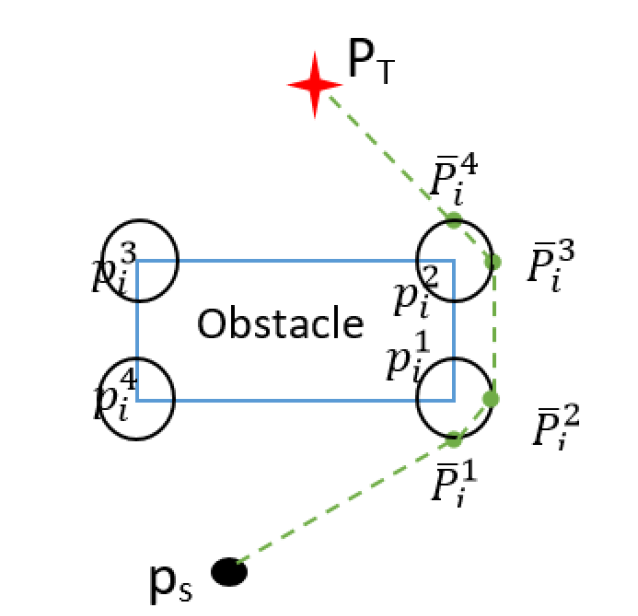
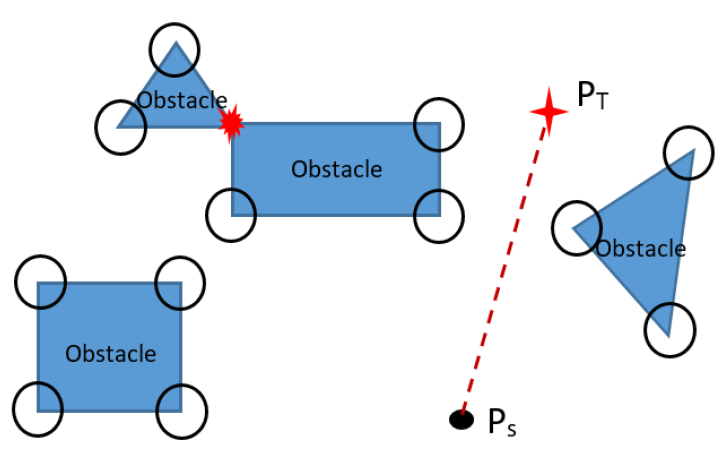
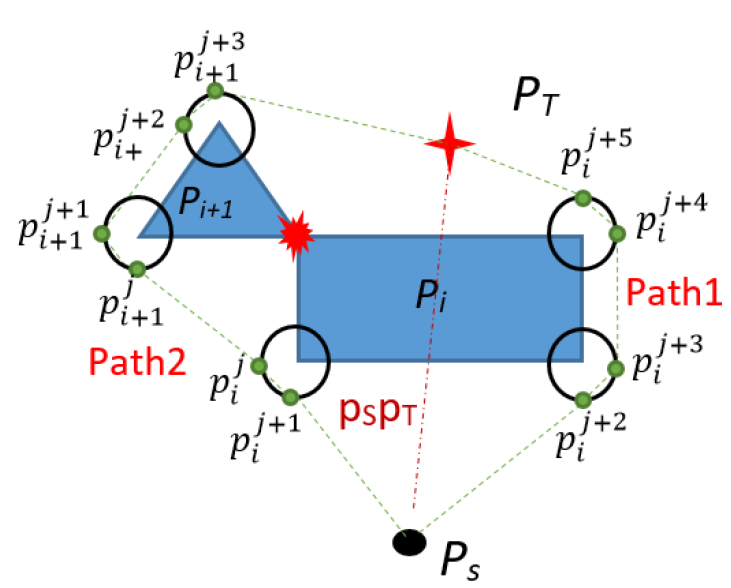
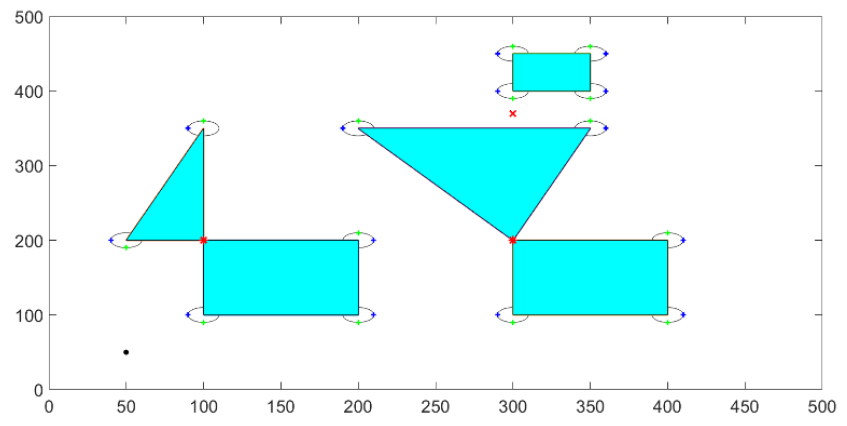
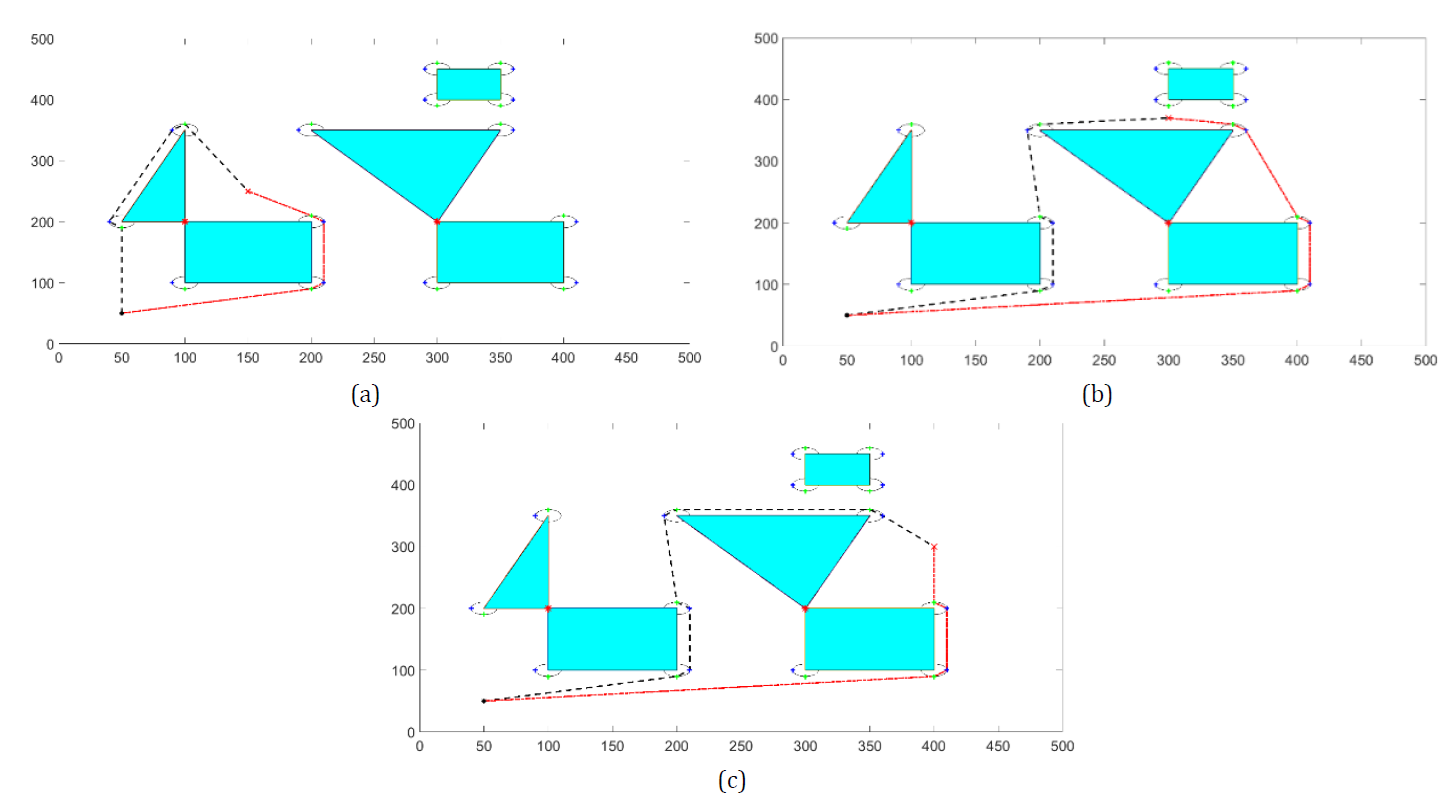
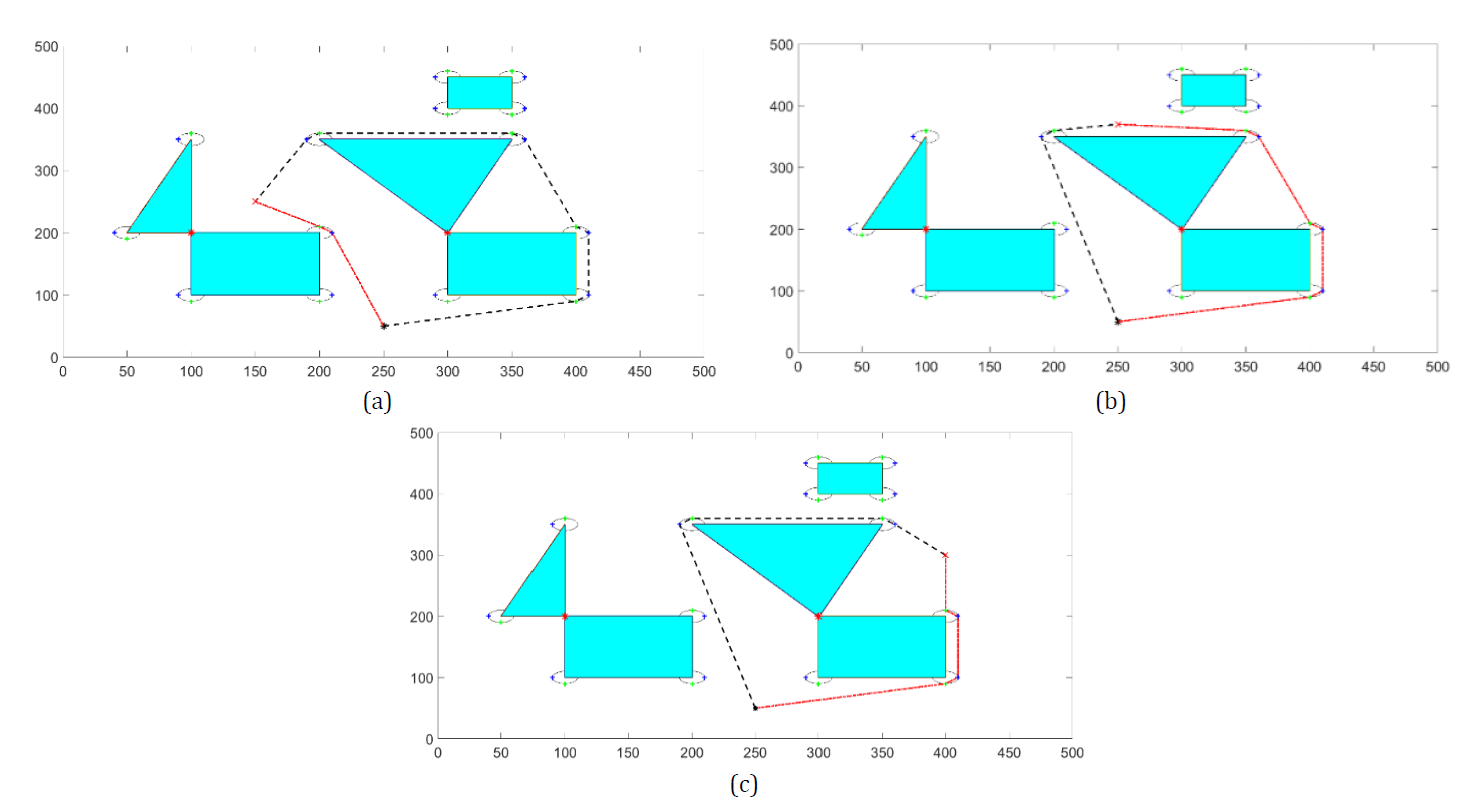
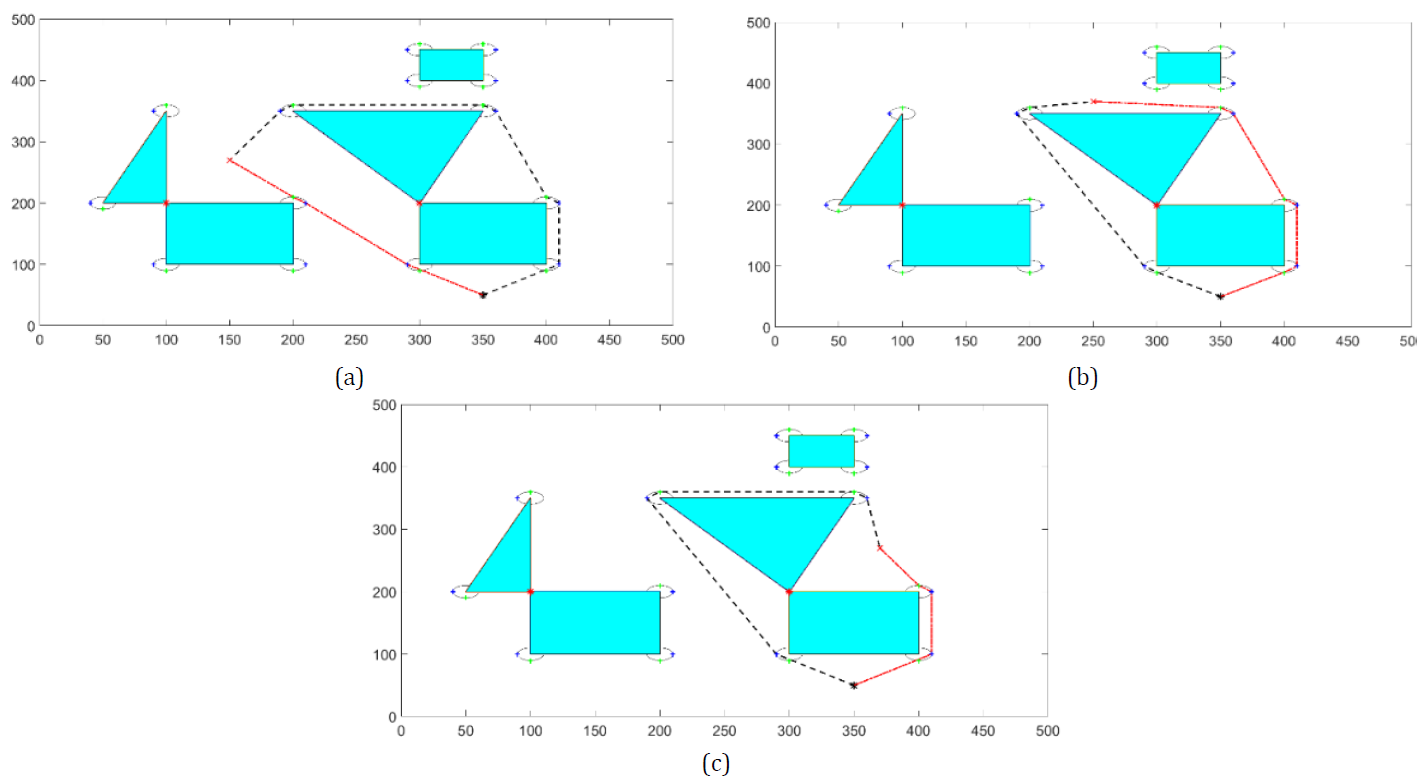
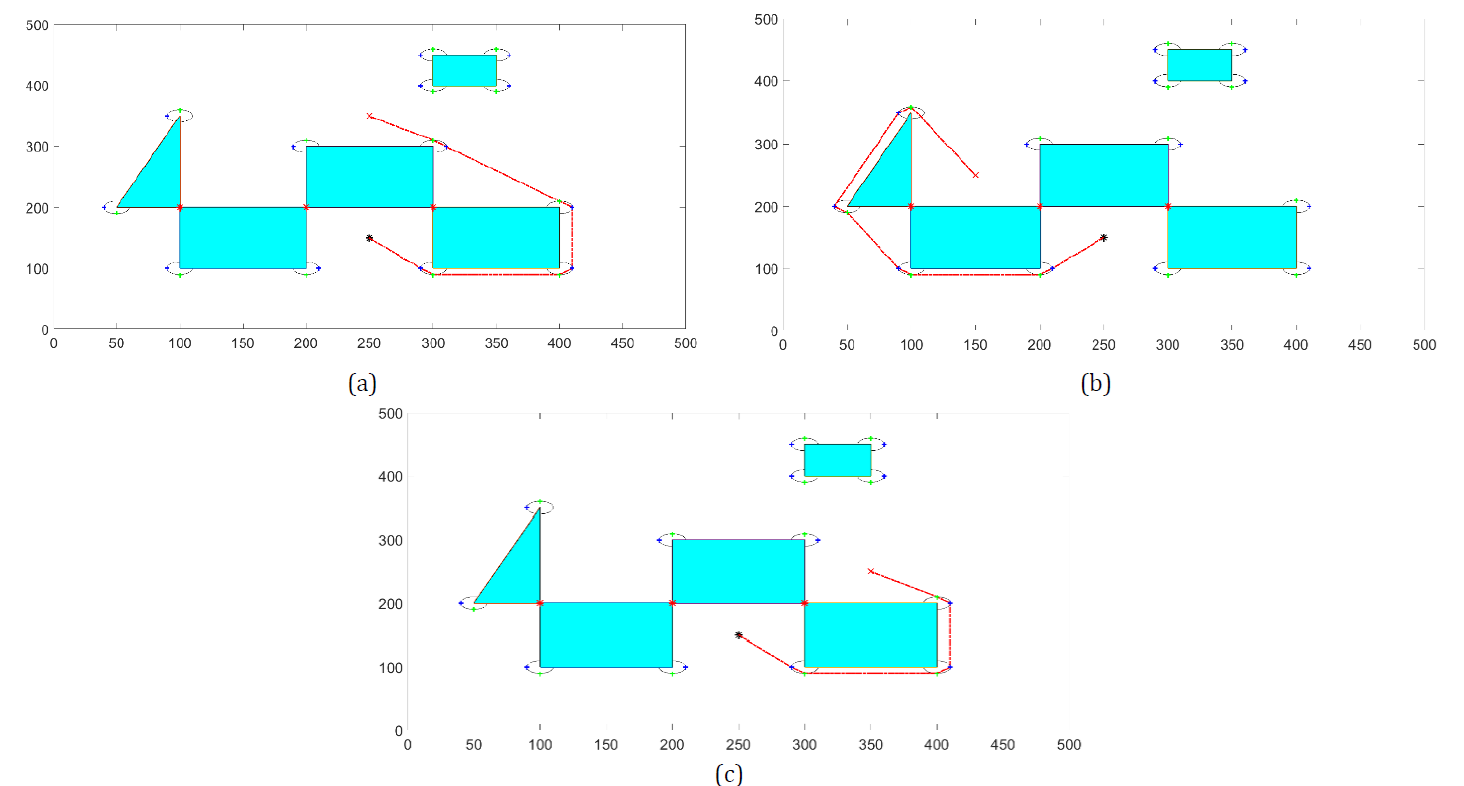
The path planning problem for a wheeled mobile robot (WMR) involves determining a collision-free path from a starting point to a target destination while optimizing a specific fitness function, such as minimizing distance, cost, or both, depending on the scenario. This research introduces a novel method for generating smooth paths for mobile robots in user-defined two-dimensional environments with stationary obstacles. The proposed method addresses the issue of local minima by utilizing free segments and path-planning turning points. The approach evaluates both path length and path safety as key objectives. Simulation results demonstrate that the proposed method effectively identifies optimal paths and validates the reliability of the control strategy for mobile robot navigation.
© 2024 The Authors. Published by IASE.
This is an
Keywords
Path planning, Mobile robots, Collision-free, Local minima, Navigation reliability
Article history
Received 19 July 2024, Received in revised form 21 October 2024, Accepted 21 November 2024
Acknowledgment
No Acknowledgment.
Compliance with ethical standards
Conflict of interest: The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Citation:
Abdulshaheed AG and Kamil F (2024). Path planning control in known environments using turning points. International Journal of Advanced and Applied Sciences, 11(12): 129-139
Figures
Fig. 1 Fig. 2 Fig. 3 Fig. 4 Fig. 5 Fig. 6 Fig. 7 Fig. 8 Fig. 9 Fig. 10 Fig. 11 Fig. 12
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tables
{kind=link}
{kind=link}
----------------------------------------------
References (33)
- Abdulshaheed AG, Hussein MB, Kadhom MA, Al Dulaimi ZM, and Gburi FH (2024). Step climbing of snake robot using script gait and traveling wave locomotion. AIP Conference Proceedings, AIP Publishing, 3051(1): 040017. https://doi.org/10.1063/5.0191637 [Google Scholar]
- Al-Kamil SJ and Szabolcsi R (2024). Optimizing path planning in mobile robot systems using motion capture technology. Results in Engineering, 22: 102043. https://doi.org/10.1016/j.rineng.2024.102043 [Google Scholar]
- Bulut V (2022). Optimal path planning method based on epsilon-greedy Q-learning algorithm. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 44: 106. https://doi.org/10.1007/s40430-022-03399-w [Google Scholar]
- Deng X, Li R, Zhao L, Wang K, and Gui X (2021). Multi-obstacle path planning and optimization for mobile robot. Expert Systems with Applications, 183: 115445. https://doi.org/10.1016/j.eswa.2021.115445 [Google Scholar]
- Dhaouadi R and Hatab AA (2013). Dynamic modelling of differential-drive mobile robots using Lagrange and Newton-Euler methodologies: A unified framework. Advances in Robotics and Automation, 2(2): 1-7. [Google Scholar]
- Duan P, Yu Z, Gao K, Meng L, Han Y, and Ye F (2024). Solving the multi-objective path planning problem for mobile robot using an improved NSGA-II algorithm. Swarm and Evolutionary Computation, 87: 101576. https://doi.org/10.1016/j.swevo.2024.101576 [Google Scholar]
- Hassani I, Ergui I, and Rekik C (2022). Turning point and free segments strategies for navigation of wheeled mobile robot. International Journal of Robotics and Control Systems, 2(1): 172-186. https://doi.org/10.31763/ijrcs.v2i1.586 [Google Scholar]
- Jogeshwar BK and Lochan K (2022). Algorithms for path planning on mobile robots. IFAC-Papers Online, 55(1): 94-100. https://doi.org/10.1016/j.ifacol.2022.04.016 [Google Scholar]
- Li C, Huang X, Ding J, Song K, and Lu S (2022a). Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Computers and Industrial Engineering, 168: 108123. https://doi.org/10.1016/j.cie.2022.108123 [Google Scholar]
- Li H, Zhao T, and Dian S (2022b). Forward search optimization and subgoal-based hybrid path planning to shorten and smooth global path for mobile robots. Knowledge-Based Systems, 258: 110034. https://doi.org/10.1016/j.knosys.2022.110034 [Google Scholar]
- Li S, Shu K, Zhou Y, Cao D, and Ran B (2021). Cooperative critical turning point-based decision-making and planning for CAVH intersection management system. IEEE Transactions on Intelligent Transportation Systems, 23(8): 11062-11072. https://doi.org/10.1109/TITS.2021.3099484 [Google Scholar]
- Li Y, Jin R, Xu X, Qian Y, Wang H, Xu S, and Wang Z (2022c). A mobile robot path planning algorithm based on improved A* algorithm and dynamic window approach. IEEE Access, 10: 57736-57747. https://doi.org/10.1109/ACCESS.2022.3179397 [Google Scholar]
- Liu L, Wang X, Yang X, Liu H, Li J, and Wang P (2023). Path planning techniques for mobile robots: Review and prospect. Expert Systems with Applications, 227: 120254. https://doi.org/10.1016/j.eswa.2023.120254 [Google Scholar]
- Miao C, Chen G, Yan C, and Wu Y (2021). Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Computers and Industrial Engineering, 156: 107230. https://doi.org/10.1016/j.cie.2021.107230 [Google Scholar]
- Ou Y, Fan Y, Zhang X, Lin Y, and Yang W (2022). Improved A* path planning method based on the grid map. Sensors, 22(16): 6198. https://doi.org/10.3390/s22166198 [Google Scholar] PMid:36015963 PMCid:PMC9416044
- Qin H, Shao S, Wang T, Yu X, Jiang Y, and Cao Z (2023). Review of autonomous path planning algorithms for mobile robots. Drones, 7(3): 211. https://doi.org/10.3390/drones7030211 [Google Scholar]
- Rafai ANA, Adzhar N, and Jaini NI (2022). A review on path planning and obstacle avoidance algorithms for autonomous mobile robots. Journal of Robotics, 2022: 2538220. https://doi.org/10.1155/2022/2538220 [Google Scholar]
- Ren G, Liu P, and He Z (2022). A global path planning algorithm based on the feature map. IET Cyber‐Systems and Robotics, 4(1): 15-24. https://doi.org/10.1049/csy2.12040 [Google Scholar]
- Rodríguez-Molina A, Herroz-Herrera A, Aldape-Pérez M, Flores-Caballero G, and Antón-Vargas JA (2022). Dynamic path planning for the differential drive mobile robot based on online metaheuristic optimization. Mathematics, 10(21): 3990. https://doi.org/10.3390/math10213990 [Google Scholar]
- Safarzadeh R and Wang X (2024). Map matching on low sampling rate trajectories through deep inverse reinforcement learning and multi-intention modeling. International Journal of Geographical Information Science, 38(12): 2648-2683. https://doi.org/10.1080/13658816.2024.2391411 [Google Scholar]
- Shu K, Yu H, Chen X, Li S, Chen L, Wang Q, Li L, and Cao D (2021). Autonomous driving at intersections: A behavior-oriented critical-turning-point approach for decision making. IEEE/ASME Transactions on Mechatronics, 27(1): 234-244. https://doi.org/10.1109/TMECH.2021.3061772 [Google Scholar]
- Szczepanski R, Tarczewski T, and Erwinski K (2022). Energy efficient local path planning algorithm based on predictive artificial potential field. IEEE Access, 10: 39729-39742. https://doi.org/10.1109/ACCESS.2022.3166632 [Google Scholar]
- Tan CS, Mohd-Mokhtar R, and Arshad MR (2021). A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms. IEEE Access, 9: 119310-119342. https://doi.org/10.1109/ACCESS.2021.3108177 [Google Scholar]
- Wang Y, Xiong R, Tang P, and Liu Y (2023). Fast and reliable map matching from large-scale noisy positioning records. Journal of Computing in Civil Engineering, 37(1): 04022040. https://doi.org/10.1061/(ASCE)CP.1943-5487.0001054 [Google Scholar]
- Wu Z, Dai J, Jiang B, and Karimi HR (2023). Robot path planning based on artificial potential field with deterministic annealing. ISA Transactions, 138: 74-87. https://doi.org/10.1016/j.isatra.2023.02.018 [Google Scholar] PMid:36822875
- Xu X, Zeng J, Zhao Y, and Lü X (2023). Research on global path planning algorithm for mobile robots based on improved A*. Expert Systems with Applications, 243: 122922. https://doi.org/10.1016/j.eswa.2023.122922 [Google Scholar]
- Yang L, Fu L, Li P, Mao J, and Guo N (2022). An effective dynamic path planning approach for mobile robots based on ant colony fusion dynamic windows. Machines, 10(1): 50. https://doi.org/10.3390/machines10010050 [Google Scholar]
- Yao M, Deng H, Feng X, Li P, Li Y, and Liu H (2023). Global path planning for differential drive mobile robots based on improved BSGA* algorithm. Applied Sciences, 13(20): 11290. https://doi.org/10.3390/app132011290 [Google Scholar]
- Yu L, Zhang Z, and Ding R (2022). Map‐matching on low sampling rate trajectories through frequent pattern mining. Scientific Programming, 2022: 3107779. https://doi.org/10.1155/2022/3107779 [Google Scholar]
- Zhang D, Chen C, and Zhang G (2024). AGV path planning based on improved A-star algorithm. In the IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference, IEEE, Chongqing, China, 7: 1590-1595. https://doi.org/10.1109/IAEAC59436.2024.10503919 [Google Scholar]
- Zhang D, Dong Y, and Guo Z (2021). A turning point-based offline map matching algorithm for urban road networks. Information Sciences, 565: 32-45. https://doi.org/10.1016/j.ins.2021.02.052 [Google Scholar]
- Zhang Z, He R, and Yang K (2022). A bioinspired path planning approach for mobile robots based on improved sparrow search algorithm. Advances in Manufacturing, 10: 114-130. https://doi.org/10.1007/s40436-021-00366-x [Google Scholar]
- Zhao L, Bai Y, and Paik JK (2023). Global-local hierarchical path planning scheme for unmanned surface vehicles under dynamically unforeseen environments. Ocean Engineering, 280: 114750. https://doi.org/10.1016/j.oceaneng.2023.114750 [Google Scholar]